潜龙二号
发布日期:2019-06-12 13:40:41
“潜龙二号”全名:“潜龙二号”自主水下机器人。是“十二五”国家863计划深海潜水器装备与技术重大项目课题之一,中国大洋矿产资源研究开发协会组织实施,中国科学院沈阳自动化研究所为技术总体单位,与国家海洋局第二海洋研究所等单位共同研制。这是一套集成热液异常探测、微地形地貌探测、海底照相和磁力探测等技术的实用化深海探测系统,主要用于多金属硫化物等深海矿产资源的勘探作业。

2018年4月6日,执行中国大洋49航次科考任务的“潜龙二号”无人潜水器成功完成第50次下潜。
研发背景
“潜龙二号”是国家“863”计划“深海潜水器技术与装备”重大项目的课题之一,由中国大洋矿产资源研究开发协会组织实施,中科院沈阳自动化所作为技术总体单位,与国家海洋局第二海洋研究所等单位共同研制。“潜龙二号”在6000米级auv“潜龙一号”的基础上,针对多金属硫化物矿区需求研制,在机动性、避碰能力、快速三维地形地貌成图、浮力材料国产化方面均有较大提高,为我国海底多金属硫化物调查和勘探提供了高效、精细、综合的先进手段。
研发背景
“潜龙二号”是国家“863”计划“深海潜水器技术与装备”重大项目的课题之一,由中国大洋矿产资源研究开发协会组织实施,中科院沈阳自动化所作为技术总体单位,与国家海洋局第二海洋研究所等单位共同研制。“潜龙二号”在6000米级auv“潜龙一号”的基础上,针对多金属硫化物矿区需求研制,在机动性、避碰能力、快速三维地形地貌成图、浮力材料国产化方面均有较大提高,为我国海底多金属硫化物调查和勘探提供了高效、精细、综合的先进手段。
设计人员
刘健“潜龙二号”总设计师、“潜龙一号”课题负责人,中科院沈阳自动化研究所水下机器人研究室总工,曾担任我国早期“CR-02 6000米自治水下机器人”总设计师。
发展历程
为了最大限度地提高科研效率、节约科研经费,大洋40航次的调研队员正式开始了“昼夜不分、黑白颠倒”的生活,AUV(4500米级深海资源自主勘查系统)组、热液异常探测组、地球物理组、地质组、综合作业组、甲板保障组等调研组长充分考虑了可能出现的一切意外情况,均制定了稳妥的值班表,确保每一个时间段、每一间实验室都有至少一人在值班、巡查。
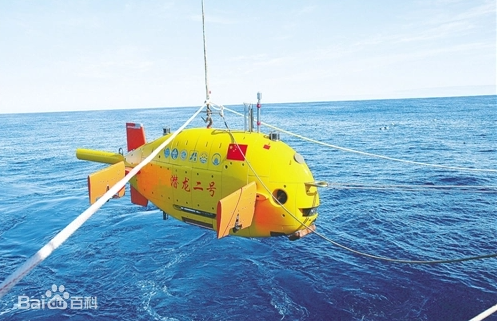
“潜龙二号”虽然名字里带“龙”,但造型却酷似电影《海底总动员》里的小丑鱼NEMO。相关负责人表示,把潜器设计成鱼的样子主要是为了适应洋中脊复杂地形的要求,让潜器自如翻山越岭,便于水面回收,减少垂直面的阻力,增强水面航行能力。
为应对水下复杂的地形地貌,“潜龙二号”在国内首次采用前视声呐作为避碰控制设备。这是一种成像声呐,即把数据采集进来后,通过图像处理方式来识别障碍和周围环境,结合避碰策略,下达紧急转向、紧急变深或变高以及跟踪策略。在解除危机后,会通过在线路径规划引导潜器回到正确的轨迹上,使其继续正常地执行任务。
2015年12月16日,执行我国第四十航次科考任务的“向阳红10号”起航,两台4500米级深海水下机器人“潜龙一号”和“潜龙二号”随船出发,首次投入实质性远洋科考。
在经过3个潜次的试验调试后, 2016年1月20日零时30分,我国自主研发的4500米级深海资源自主勘查系统(AUV)——“潜龙二号”在西南印度洋完成了第5次大洋下潜勘探,全部探测功能测试取得成功。“潜龙二号”总设计师刘健介绍说,在第5次下潜中,“潜龙二号”进行了全部探测功能测试,拍摄了300余张海底高清照片,获得甲烷、浊度、温度、磁力等海底环境参数数据,以及近底50米微地形地貌有效数据,达到预期目的。
2016年2月15日,西南印度洋,科考船“向阳红10号”携带的起重机挂钩成功钩住了鲜黄、鱼形的深海潜水器“潜龙二号”,并将之缓缓送上后甲板。藉此,我国首台自主研发的面向神秘的大洋热液区探测的4500米级自主水下机器人的首次试验性应用任务成功完成,意味着其已开始为我国勘探西南印度洋海底资源,调查极为复杂的海底地形地貌做出贡献。
勘探过程
经过9日一天的布阵、测阵及2016年1月10日天一大早的准备工作,“潜龙二号”的处女航已经全部准备就绪,以往没有安装的磁力仪也已安装完毕,呈现出它最完整的优雅姿态,阳光下的“潜龙二号”显得典雅又美丽。
当地时间2016年1月12日早上8点,在止荡绳的牵引下,“潜龙二号”缓缓由“向阳红10”船的后甲板没入水中,入水后的“潜龙二号”开始有了自主“行动力”,只见一条黄色的“胖鱼”迅速向下“游”去,很快,“胖鱼”变成了一个黄色的小点,消失在视野范围之内。
“潜龙二号”的副总设计师赵宏宇说,2016年1月9日的准备阶段,就是在为“潜龙二号”设置“卫星导航”的阶段。由科研人员下放四个应答器,由超短基线对四个应答器进行位置标定,谓之“测阵”。每个应答器之间距离大约为3公里,被辐射到的区域皆将成为“潜龙二号”的导航区域,AUV可以向应答器发射信号,通过接收到的讯息来判定自己所在的具体位置,从而进行梳形搜索。此外,随“潜龙二号”下水的还有一台声波通讯机,声通讯机与AUV之间达成“沟通”,再由声通讯机将“沟通结果”发送给船上的科研人员,以此达到实时监控的作用。“潜龙二号”的探测任务包括了海底地形地貌探测、热液异常探测、磁力探测等内容。
“潜龙二号”在水中探测了9个小时左右时间,2016年1月12日下午6时左右,它自动抛载上浮于“向10”船的南面,距离船体还有一定距离。在“向10”及4500米级AUV缓缓靠近的过程中,首先映入眼帘的是几只信天翁,它们新奇地“盯着”这台巨大的黄“鱼”,不停地用嘴啄。“嘭”的一声巨响,“潜龙二号”抛出一条橘红色牵引绳,再由科研人员发射一条打捞绳,两根绳系好“水手结”,慢慢让AUV浮至船尾,至此,回收工作的第一步告一段落。紧接着,科研人员用钩子分别给“潜龙二号”的牵引环套上止荡绳,缓缓用A架将“潜龙二号”吊起,重新固定在后甲板上。
2018年2月9日,“向阳红10”船抵达西南印度洋工作区,11时50分,“潜龙二号”顺利布放入水进行探测作业。这是“潜龙二号”大洋49航次的首次下潜,也是“潜龙二号”的第四十次下潜。此次下潜,“潜龙二号”在近海底工作30小时,航程约70千米,最大潜深2920米,在地形起伏1800多米的区域内,获得了大量的精细地形地貌数据和多种传感器探测数据,表明“潜龙二号”具有高智能自主避障能力和稳定航行控制能力。本航次应用是“潜龙二号”连续第三年应用,说明其在技术上完全具备了在洋中脊复杂地形中航行探测的能力,我国自主研发的水下自主机器人在技术上达到了国际先进水平。
2018年4月6日,在西南印度洋执行中国大洋49航次科考任务的“潜龙二号”无人潜水器成功完成第50次下潜,并将在本航次科考任务结束后正式进行技术升级。 (图文资料来源于百度百科)